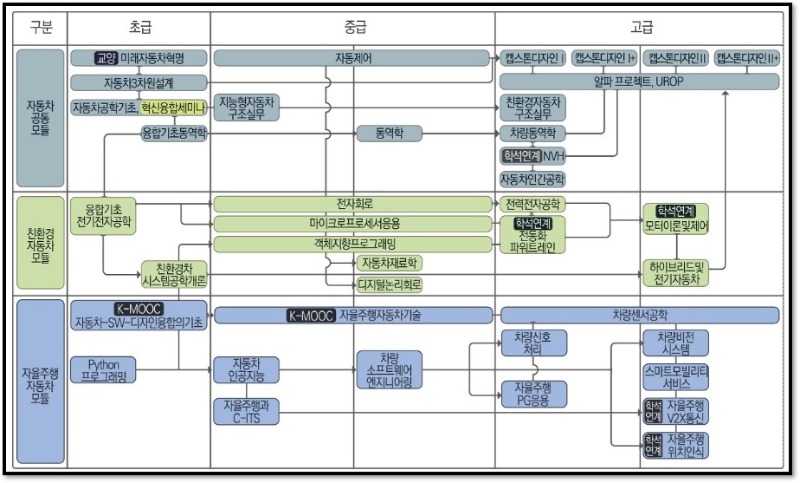
미래자동차 분야별 교과목 구성
- 자동차공통 15과목, 친환경자동차 11과목, 자율주행자동차 13과목
- 2단계 (4~6차년도)에서 15개교과목 신규 추가 개설 예정
초급인재
| 구분 | 교과목명 | 개요 |
|---|---|---|
| 기존보유(개편) | 자동차공학기초① (이론3시간) |
|
| 미래자동차혁명(교양)① (이론3시간) |
|
|
| 융합기초동역학 (정역학/동역학 기초, 브릿지)① (이론3시간) |
|
|
| 자동차3차원설계① (이론2+실습2시간) |
|
|
| 친환경차시스템공학개론② (이론3시간) |
|
|
| 자동차SW디자인융합의기초 (K-MOOC)③ (이론3시간) |
|
|
| Python프로그래밍 (차량응용실습포함)③ (이론2+실습2시간) |
|
|
| 신규개발 | 융합기초전기전자공학 (브릿지 교과목)② (이론3시간) |
|
| 혁신융합세미나① (이론1시간) |
|
중급인재
| 구분 | 교과목명 | 개요 |
|---|---|---|
| 기존보유(개편) | 동역학① (이론3시간) |
|
| 자동제어① (이론3시간) |
|
|
| 지능형자동차구조실무① (이론2+실습2시간) |
|
|
| 전자회로② (이론3시간) |
|
|
| 마이크로프로세서② (이론2+실습2) |
|
|
| 자율주행자동차기술(K-MOOC)③ (이론3시간) |
|
|
| 차량소프트웨어엔지니어링③ (이론3시간) |
|
|
| 자율주행과C-ITS③ (이론3시간) |
|
|
| 객체지향프로그래밍(실습포함)② (이론2+실습2시간) |
|
|
| 신규개발 | 자동차인공지능③ (이론2+실습2시간) |
|
고급인재
| 구분 | 교과목명 | 개요 |
|---|---|---|
| 기존보유(개편) | 차량동역학① (이론3시간) |
|
| 캡스톤디자인1① 캡스톤디자인2① 캡스톤디자인1+① (여름,경진대회연계) 캡스톤디자인2+① (겨울,경진대회연계) (집합실습3시간+개별 2시간) |
|
|
| 알파프로젝트 (자작차동아리연합)① (수업시수:학점연동) |
|
|
| 친환경자동차구조실무② (이론2+실습2시간) |
|
|
| 전력전자공학② (이론3시간) |
|
|
| 전동화파워트레인 (학석사연계)② (이론3시간) |
|
|
| 차량비전시스템③ (이론3시간) |
|
|
| 스마트모빌리티서비스③ (이론3시간) |
|
|
| 차량신호처리③ (이론3시간) |
|
|
| 신규개발 | NVH(학석사연계)① (이론3시간) |
|
| 모터이론및제어(학석사연계)② (이론2+실습2) |
|
|
| 차량센서공학③ (이론3시간) |
|
|
| 자율주행V2X통신(학석사연계)③ (이론2+실습2) |
|
|
| 자율주행위치인식(학석사연계)③ (이론2+실습2)전력전자공학② (이론3시간) |
|
|
| 자율주행 PG 응용 (자율주행 트랙 활용 이론/실무)③ |
|
|
| UROP (실습6시간) |
|
※미래자동차 마이크로디그리 과정은 대림대학교 학사규정, 마이크로디그리 운영규정과 운영지침에 따름